Traditional alarm clocks fail 43% of users who develop snooze habits, leading to unhealthy sleep cycles. The Circadian Rhythm Regulating Device eliminates the snooze option through gentle physical stimulation—tickling combined with water spraying—forcing users out of bed.
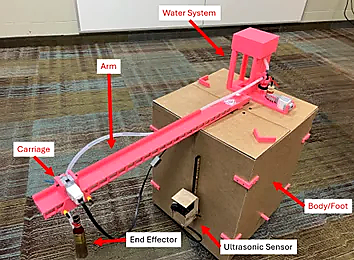
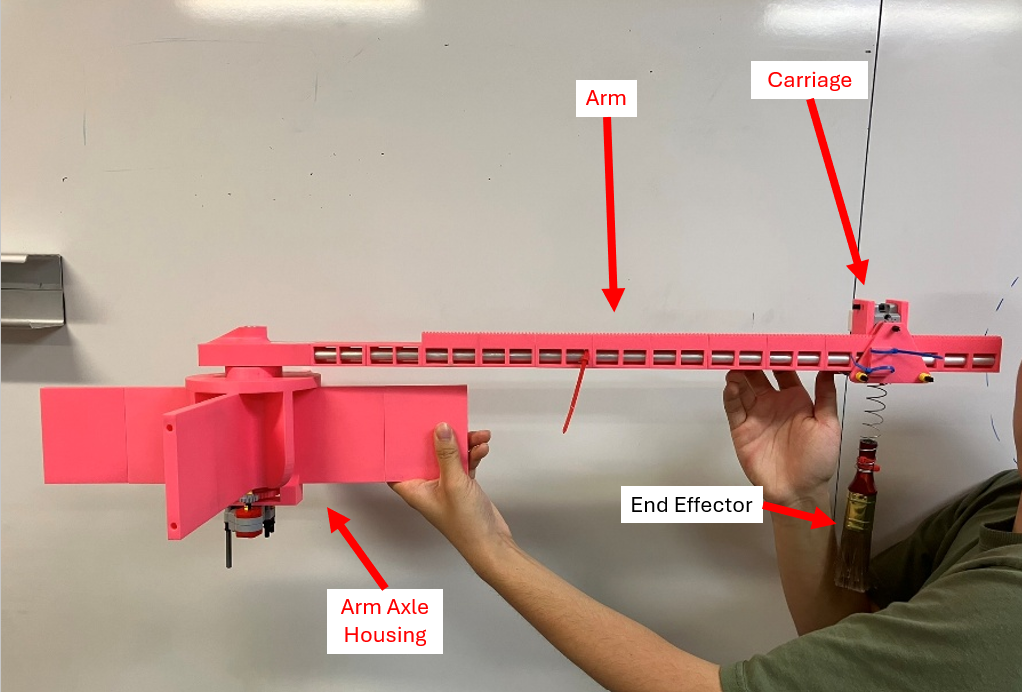
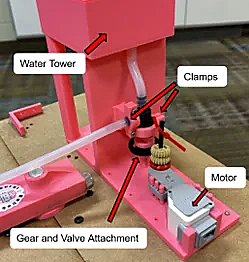
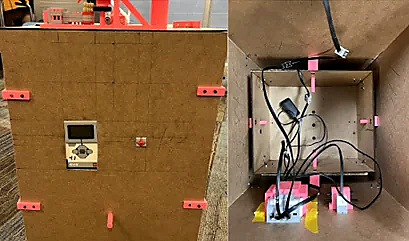
This ME 101 team project features a rotating arm with paintbrush end effector, ultrasonic sensor for presence detection, and gravity-fed water system, all controlled by an EV3 microcontroller.
🔑 Need Statement
"A need exists to develop a mechanical solution that enforces wake-up routines while ensuring safe user operation."