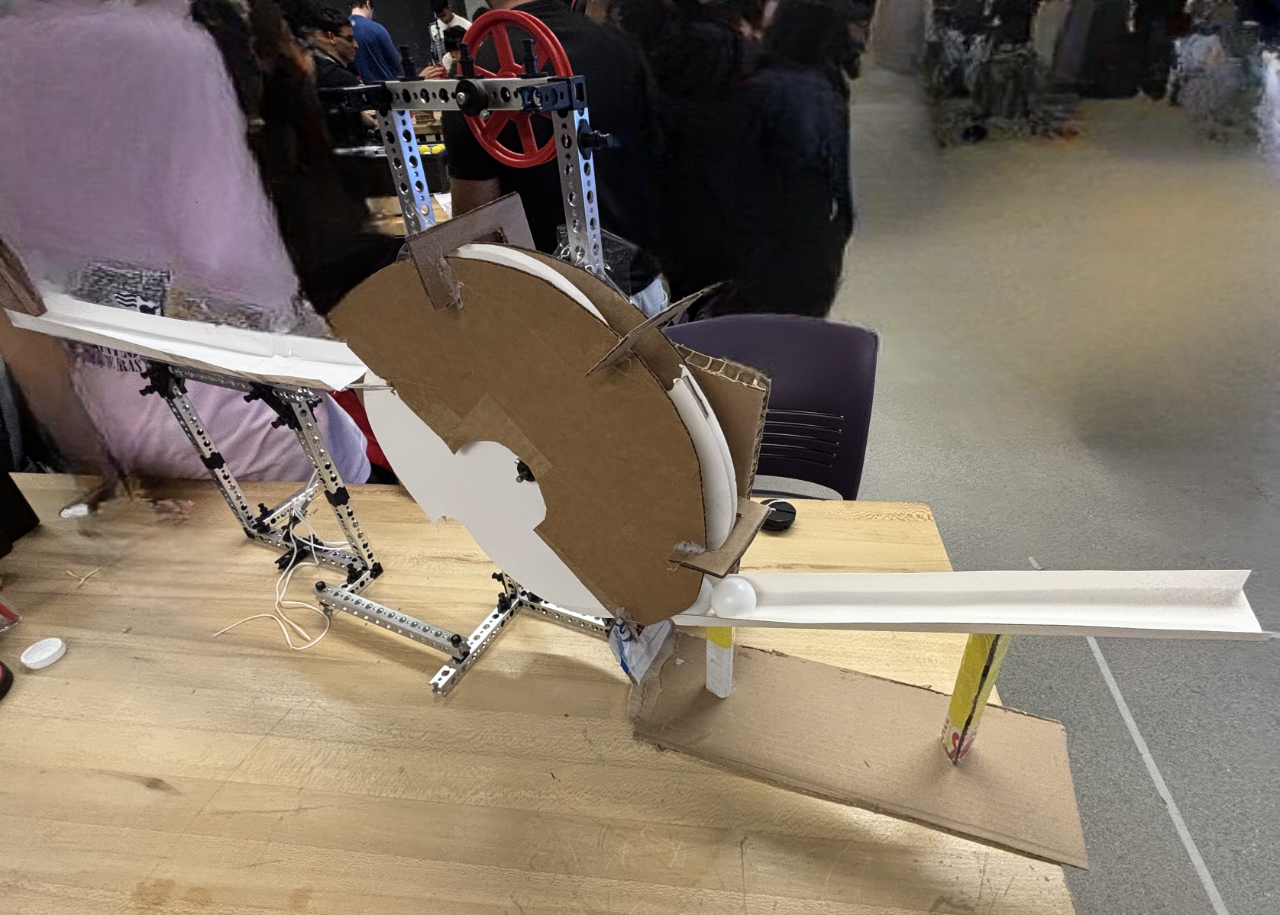
This project is a gravity-powered mechanical system designed to lift and transport ping pong balls using a rotating Ferris-wheel-style mechanism. The system operates without motors, electronics, or active control, relying entirely on the gravitational potential energy of a falling mass.
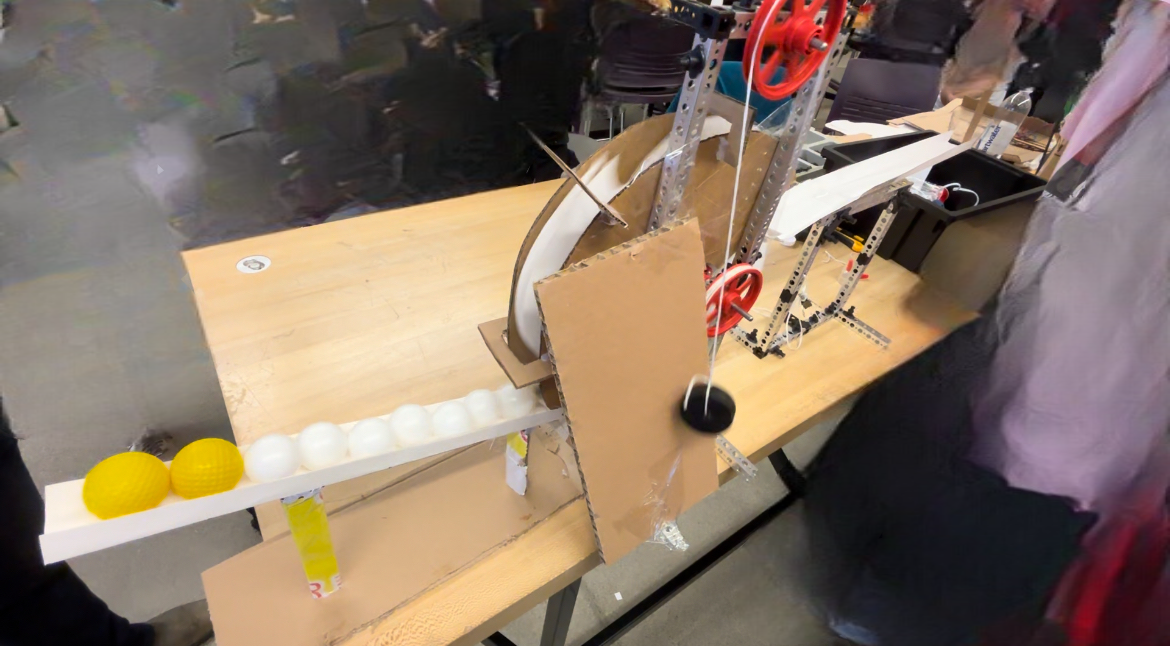
As the wheel rotates, curved cutouts capture balls at the base, lift them upward, and passively release them near the top onto a sloped exit ramp. The design emphasizes mechanical simplicity, geometric timing, and energy efficiency, demonstrating how controlled motion can be achieved using only gravity and mechanical design.